Previously I left off on the abysmal performance of the stock drivetrain, but let’s talk about the modeling aspect of this project before going back. Last time I suggested that plastic modeling was about fitting parts and sticking parts, and J elaborated that it’s about compensating for deficiencies in the manufacturing process.
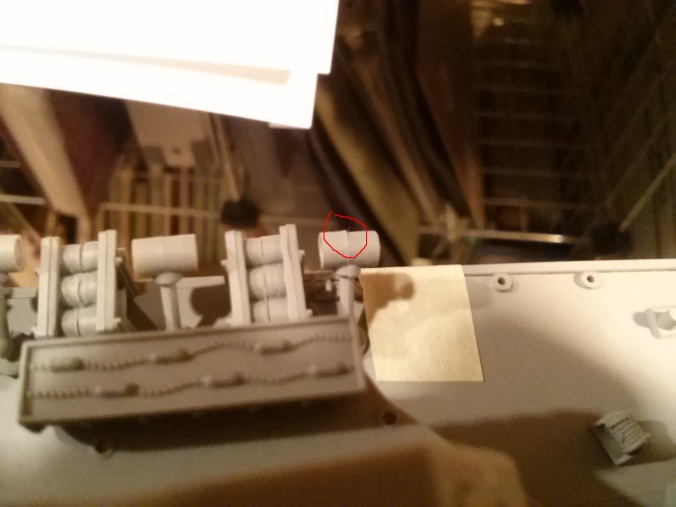
Of course, there are some deficiencies that you can’t really fix, such as the very clearly misaligned molds that made the above part. The offset is less than a millimeter, but when the part is only a couple millimeters in diameter, it’s pretty significant.
Painting was probably the biggest headache though. Due to the local unavailability of a consistent set of model paints, I used some generic brand grey spray primer, some really old black model spray paint, some Krylon all-purpose red spray paint, and Krylon enamel black and white regular (in a jar) paint. After a couple test parts (during which I found out it was probably better to assembly large assemblies before painting), I sprayed almost all of the parts with the primer first, and then applied the other colors where need be.

I made two masks on the hull to get the red bottom and the black line. It was kind of a pain to do curves, but all in all it didn’t bleed that much, and turned out pretty well. I think I may have made the line a little too low (when the boat is fully loaded the water rises just above the black line), but the instructions didn’t specify where I should put it, so it was all done by eye and ruler. I also think a “finer” masking tape would have further limited the bleed, but on the hull it’s nowhere near as bad as it is on the stacks
{kind=link}

Here is the nearly completed Melvin next to the Titanic. I’m mostly happy with the end result especially since this is my first attempt at a plastic model in probably close to a decade. The quality is definitely enough to have fulfilled the childhood dream! The real-life size of the ship is nearly half that of the Titanic, but the scales are 1/125 and 1/360, respectively.
So going back to the performance issue: I originally didn’t think I had the appropriate equipment to properly characterize motor performance, so I couldn’t be certain what kind of motor(s) I had or needed. Thus, I decided to go with a known quantity and shoehorned my trusty Solar Motor 2 (Titanic’s performance was superb with SM2) into the stock gearbox by destroying the existing motor mount and using an extra gear from the kit to get that 1:1 gearing.
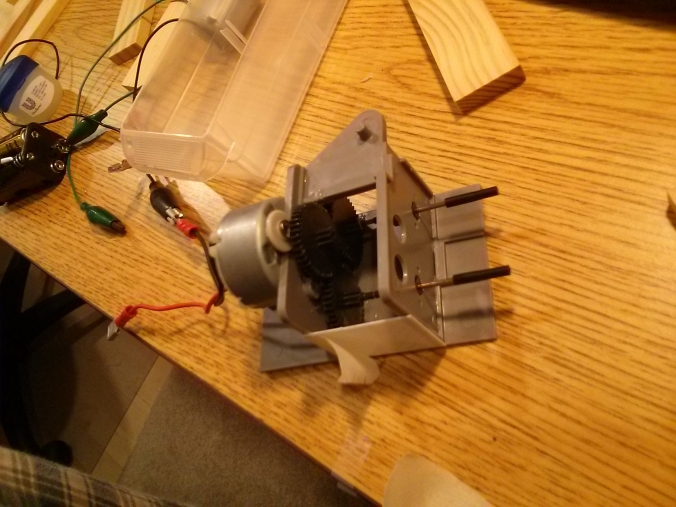
Mounting such a large-diameter motor so high meant that I actually couldn’t install one of the torpedo launchers without chopping up a part that I didn’t want to chop up (yet). Not mounting the launcher did give me a hole out of which to stick my antenna, though.
After messing with the engine and gearbox, I found the amazing Lego 5206 “Speed Computer”, which doesn’t technically measure speed, but RPM. The granularity isn’t great, and I’m not sure how accurate it is, but we’re not doing any rocket science (or precision engineering) here.
Static testing with 5206 indicates that I’m getting about 2400rpm at about 4.8v (measured at the motor – that’s a whole volt under the measured idle voltage from the battery pack) at full load. According to Mabuchi’s official spec sheet for the SM2 (which is an RF-500TB) and assuming I have the 14415 model (the sticker doesn’t specify), the motor is actually running close to maximum efficiency at full speed. I’m not sure if I buy this happy coincidence – I wish I had a multimeter that could measure more than a measly 100mA. Qualitatively, I feel that I’m getting about as much thrust as I got with Titanic in the same sort of test, even if the Melvin’s drivetrain efficiency is probably much, much worse.
One “practical” aspect of this calculation: once you get the load power draw of the motor (seemingly about 150mA x 4.8v = 0.72W), you can get a feel for how long the batteries will last! According to my Google-fu, a D battery is typically good for about 1.5v x 14000mAH = 21(!) watt-hours (for comparison an entire MBA 11 battery has about 29WHr, but it’s rechargeable), so if I’ve got four of them, I should be good for something in the realm of 80(!) hours (not counting receiver and ESC power). Obviously performance will suffer as the batteries drain, but this clearly explains how these things have lasted so long.

Finally I have some remarks on the Melvin’s first real outing. Early in the morning I went to the pond at Las Palmas park near J’s house to find out it was closed. So I went to work early, left early, and went to Shoreline. Shoreline is a pretty windy place, but there’s a big lake out there on which people sometimes sail real boats.
To scale I was probably throwing the Melvin into hurricane weather. It was hard just to launch the boat due to the inclined bank and inbound wind, and once it got out there, I was basically perpetually fearful that something bad would happen. If I ran parallel to the shore, not only would the wind cause the ship to list, but it would rock violently between the troughs and crests of the waves. If I ran perpendicular to the shore, the boat was fairly stable laterally (though it would still list from the wind), but there were definitely times that waves went over the bow, and I regularly had to dump water. The boat was also much more stable if you kept it moving, so I did just that.
Hence it was really hard to take any pictures as I don’t have enough hands.
Next time, good pics and customization! Obviously pending finding a driver such that I can take good pics and getting the customization done.